
Datoteka:Capri sights.png
Veličina ovog prikaza: 800 × 440 piksela. Ostale razlučivosti: 320 × 176 piksela | 640 × 352 piksela | 1.024 × 563 piksela | 1.280 × 704 piksela | 2.000 × 1.100 piksela.
Vidi sliku u punoj veličini (2.000 × 1.100 piksela, veličina datoteke: 1,05 MB, MIME tip: image/png)
| Ova je datoteka sa Zajedničkog poslužitelja i mogu je rabiti drugi projekti. Opis s njezine stranice s opisom datoteke prikazan je ispod. |
Sažetak
| Opis |
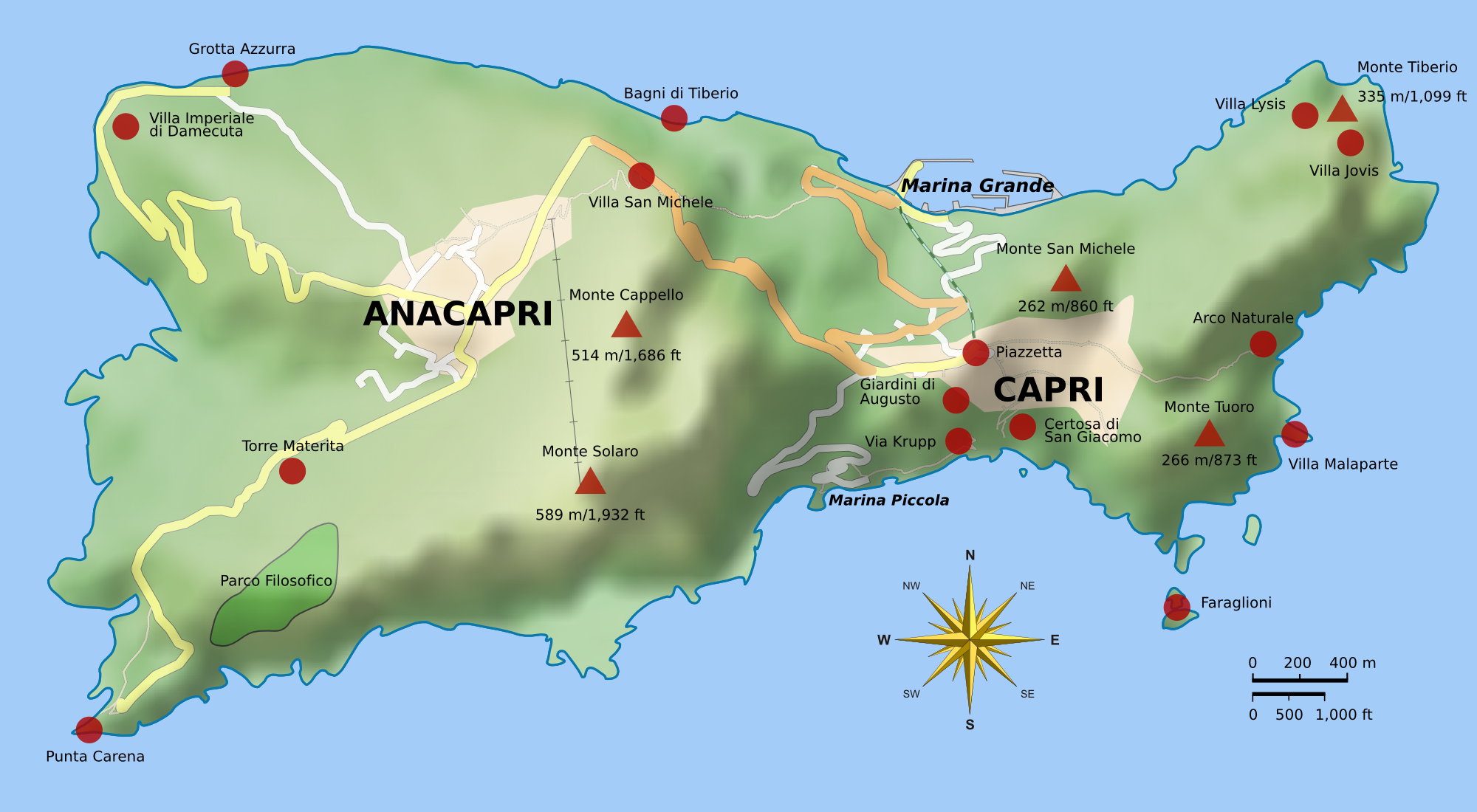
English: Map of Capri. Uses terrain data from SRTM3 (http://dds.cr.usgs.gov/srtm/version2_1/SRTM3/Eurasia/N40E014.hgt.zip). Bitmap version of File:Capri_sights_terrain.svg.
|
| Datum | |
| Izvor | Vlastito djelo postavljača |
| Autor |
Morn the Gorn compass rose from Maps_template-fr.svg: Eric Gaba (Sting - fr:Sting) Road and rail data from OpenStreetMap |
| Ostale inačice |
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Code
Terrain shading layer was generated with the following Python script (requires Python Imaging Library and NumPy):
# Read SRTM3 file and create shaded relief
# 2010-04-05
from struct import unpack,calcsize
from numpy import *
import numpy as np
from PIL import Image
row_length = 1201 # row_length is 1201 for SRTM3 or 3601 for SRTM1
file_name = "N40E014.hgt" # from http://dds.cr.usgs.gov/srtm/version2_1/SRTM3/Eurasia/
hlim = 800 # height limit for map [m]
ref_lat = 40.55 # reference latitude
earth_eq = 6371. * 1000. * 2. * pi
x_scale = 1./360.*earth_eq*cos(ref_lat/180.*pi)/row_length
y_scale = 1./360.*earth_eq/row_length
print "1 pixel = %u * %u m" % (x_scale, y_scale)
print "factor", y_scale/x_scale
h = zeros((row_length, row_length))
f = open(file_name, 'r')
li = []
for j in range(row_length):
for i in range(row_length):
d = f.read(2)
(height,) = unpack('>h', d)
h[i,j] = height
if height < -1000:
li.append((i,j))
hmax = h.max()
h3 = zeros_like(h)
h3[:,:] = h[:,:]
print len(li), "missing data points"
def get_nei(z):
h2 = h[z[0]-1:z[0]+2,z[1]-1:z[1]+2]
nn = sum(where(h2 < -1000, 0, 1))
av = sum(where(h2 > -1000, h2, 0)) / float(nn)
return nn, av
# fill missing points with a nearest-neighbor averaging method:
loop = len(li)
lim = 7
while loop > 0:
sd = False
for q in range(len(li)):
if h[li[q]] > -1000.: continue
n, a = get_nei(li[q])
if n >= lim:
print li[q],loop, n, a, lim
h3[li[q]] = a
loop -= 1
sd = True
if not sd: lim -= 1
h[:,:] = h3[:,:]
print "missing points done"
def hext(a):
"Hex color to triplet."
r,g,b = a[0:2], a[2:4], a[4:6]
return int(r, 16), int(g, 16), int(b, 16)
# from http://en.wikipedia.org/wiki/Wikipedia:WikiProject_Maps/Conventions/Topographic_maps:
col_sea = hext("0978ab")
cols = """
{{Mapcolor|r=245|v=244|b=242|hex=#F5F4F2|col=black}}
{{Mapcolor|r=224|v=222|b=216|hex=#E0DED8|col=black}}
{{Mapcolor|r=202|v=195|b=184|hex=#CAC3B8|col=black}}
{{Mapcolor|r=186|v=174|b=154|hex=#BAAE9A|col=black}}
{{Mapcolor|r=172|v=154|b=124|hex=#AC9A7C|col=black}}
{{Mapcolor|r=170|v=135|b=83|hex=#AA8753|col=black}}
{{Mapcolor|r=185|v=152|b=90|hex=#B9985A|col=black}}
{{Mapcolor|r=195|v=167|b=107|hex=#C3A76B|col=black}}
{{Mapcolor|r=202|v=185|b=130|hex=#CAB982|col=black}}
{{Mapcolor|r=211|v=202|b=157|hex=#D3CA9D|col=black}}
{{Mapcolor|r=222|v=214|b=163|hex=#DED6A3|col=black}}
{{Mapcolor|r=232|v=225|b=182|hex=#E8E1B6|col=black}}
{{Mapcolor|r=239|v=235|b=192|hex=#EFEBC0|col=black}}
{{Mapcolor|r=225|v=228|b=181|hex=#E1E4B5|col=black}}
{{Mapcolor|r=209|v=215|b=171|hex=#D1D7AB|col=black}}
{{Mapcolor|r=189|v=204|b=150|hex=#BDCC96|col=black}}
{{Mapcolor|r=168|v=198|b=143|hex=#A8C68F|col=black}}
{{Mapcolor|r=148|v=191|b=139|hex=#94BF8B|col=black}}
{{Mapcolor|r=172|v=208|b=165|hex=#ACD0A5|col=black}}
"""
col = []
for l in cols.splitlines():
if len(l) < 10: continue
i = l.find('#')
if i > -1:
col.append(hext(l[i+1:i+7]))
col.reverse() # -> bottom to top
o = Image.new('RGB', h.shape)
def interp(c, f):
"Interpolate into color table."
r = int((1.-f) * col[c][0] + f * col[c+1][0])
g = int((1.-f) * col[c][1] + f * col[c+1][1])
b = int((1.-f) * col[c][2] + f * col[c+1][2])
return r,g,b
for j in range(row_length):
for i in range(row_length):
c, f = divmod(h[j,i] / hmax * (len(col)-1), 1)
if 0 < h[j,i] < hmax:
o.putpixel((j,i), interp(int(c), f))
elif h[i,j] == hmax:
o.putpixel((j,i), col[-1])
else: o.putpixel((j,i), col_sea)
o.save("map_height.png") # save height map
o2 = o.crop((0,0,942,603))
o2.save("map_height_cropped.png")
# taken from hillshade.py:
#def illumination(idata,azdeg=315.0,altdeg=45.):
def illumination(idata,azdeg=225.0,altdeg=45.):
# convert alt, az to radians
az = azdeg*np.pi/180.0
alt = altdeg*np.pi/180.0
# gradient in x and y directions
dx, dy = np.gradient(idata)
slope = 0.5*np.pi - np.arctan(np.hypot(dx, dy))
aspect = np.arctan2(dx, dy)
odata = np.sin(alt)*np.sin(slope) + np.cos(alt)*np.cos(slope)*np.cos(-az -\
aspect - 0.5*np.pi)
# rescale to interval -1,1
# 1 means maximum sun exposure and 0 means complete shade.
odata = (odata - odata.min())/(odata.max() - odata.min())
return odata
il = 255 * illumination(h)
o4 = Image.new('RGBA', il.shape)
for j in range(row_length-1):
for i in range(row_length-1):
v = int(il[j,i])
if 0 <= v < 128:
alpha = (255 - 2*v)
o4.putpixel((j,i), (0,0,0,alpha))
elif v == 128:
o4.putpixel((j,i), (0,0,0,0))
elif 128 < v < 256:
alpha = 2*(v-128)
o4.putpixel((j,i), (255,255,255,alpha))
else:
o4.putpixel((j,i), (255,255,255,0))
o4.save("il_NW_alpha.png") # NW-illuminated (alpha transparency for use with Inkscape)
Licencija
Ja, nositelj autorskog prava za ovo djelo, ovime ga objavljujem pod sljedećim licencijama:
Ova datoteka je licencirana pod Creative Commons Imenovanje-Dijeli pod istim uvjetima 3.0 nelokaliziranom licencijom.
- Slobodno smijete:
- dijeliti – umnožavati, distribuirati i javnosti priopćavati djelo
- remiksirati – prerađivati djelo
- Pod sljedećim uvjetima:
- imenovanje autora – Morate pripisati odgovarajuće autorske zasluge, dati poveznicu na licenciju, te naznačiti jesu li načinjene promjene autorskog djela. Prethodno navedeno možete učiniti na svaki razuman način, ali ne na način koji bi sugerirao da Vi ili Vaše korištenje licencorova djela ima izravno licencorovo odobrenje.
- dijeli pod istim uvjetima – Ako ovo djelo izmijenite, preoblikujete ili stvarate na osnovu tog materijala, svoje doprinose morate distribuirati pod istom ili kompatibilnom licencijom kao što je i licencija originala.

|
Dozvoljava se umnožavanje, dijeljenje i/ili mijenjanje ovog dokumenta pod uvjetima GNU-ove licence za slobodnu dokumentaciju, inačica 1.2 ili kasnija ako ju je objavio Free Software Foundation; bez nepromjenjivih ili obveznih dijelova i bez teksta na naslovnoj i/ili posljednjoj stranici. Kopija licencije je uključena u odjeljak naslovljen GNU-ove licence za slobodnu dokumentaciju. |
Možete odabrati licenciju prema vašem izboru.
Povijest datoteke
Kliknite na datum/vrijeme kako biste vidjeli datoteku kakva je tada bila.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datum/Vrijeme | Minijatura | Dimenzije | Suradnik | Komentar | |
|---|---|---|---|---|---|
| sadašnja | 00:15, 1. listopada 2010. | | 2.000 × 1.100 (1,05 MB) | Morn | added OpenStreetMap layer |
| 00:55, 8. travnja 2010. |  | 2.000 × 1.100 (951 KB) | Morn | added scale in feet | |
| 20:44, 7. travnja 2010. |  | 2.049 × 1.154 (956 KB) | Morn | more mountains | |
| 15:47, 7. travnja 2010. |  | 2.000 × 1.100 (935 KB) | Morn | mountain heights | |
| 23:48, 6. travnja 2010. |  | 2.000 × 1.100 (914 KB) | Morn | Philosophical Park as area | |
| 20:58, 5. travnja 2010. |  | 2.000 × 1.100 (909 KB) | Morn | improved terrain | |
| 20:59, 4. travnja 2010. |  | 2.000 × 1.100 (857 KB) | Morn | compass rose | |
| 17:45, 4. travnja 2010. |  | 2.000 × 1.100 (818 KB) | Morn | hypsometric colors | |
| 02:32, 4. travnja 2010. |  | 2.000 × 1.127 (670 KB) | Morn | slightly stronger colors | |
| 21:44, 3. travnja 2010. |  | 2.000 × 1.100 (655 KB) | Morn | terrain shading from SRTM 3 data |
Uporaba datoteke
Na ovu sliku vode poveznice sa sljedećih stranica:
Globalna uporaba datoteke
Sljedeći wikiji rabe ovu datoteku:
- Uporaba na ar.wikipedia.org
- Uporaba na bn.wikipedia.org
- Uporaba na br.wikipedia.org
- Uporaba na ca.wikipedia.org
- Uporaba na co.wikipedia.org
- Uporaba na cs.wikipedia.org
- Uporaba na da.wikipedia.org
- Uporaba na de.wikipedia.org
- Uporaba na en.wikipedia.org
- Uporaba na en.wikivoyage.org
- Uporaba na eo.wikipedia.org
- Uporaba na es.wikipedia.org
- Uporaba na fi.wikipedia.org
- Uporaba na fr.wikipedia.org
- Uporaba na fr.wiktionary.org
- Uporaba na gl.wikipedia.org
- Uporaba na he.wikipedia.org
- Uporaba na hsb.wikipedia.org
- Uporaba na it.wikipedia.org
- Uporaba na ja.wikipedia.org
- Uporaba na ko.wikipedia.org
- Uporaba na la.wikipedia.org
- Uporaba na mk.wikipedia.org
- Uporaba na nl.wikipedia.org
- Uporaba na nn.wikipedia.org
- Uporaba na no.wikipedia.org
Pogledajte globalnu uporabu ove datoteke.
{kind=link}
{kind=link}